Final Project: 3-Dimensional Magnetic Field Mapper
I built an apparatus that would map a magnetic field in three dimensions emanating from the tip of a steel rod inserted through an electromagnetic coil. This project involved the design and construction of two systems: the first is an electromagnetic coil winder, and the second is the field mapping device.
Electromagnetic Coil Winder
The electromagnetic coil winder was designed to build coils from small to large. I only required small coils for this project; however, the university potentially had use for much larger coils in other experimental setups. The coil winder was constructed primarily using http://www.openbuilds.com aluminum extrusion rails and accessories. Textron Specialized Vehicles granted permission for me to design and machine custom blocks. A Raspberry Pi 2b is used to count the turns on the winder.




































Three-dimensional Magnetic Field Mapper
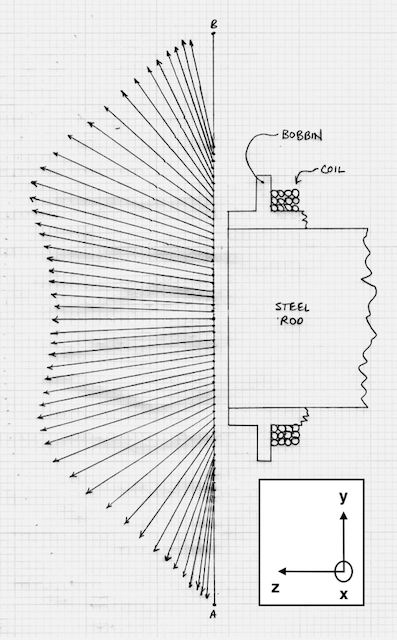
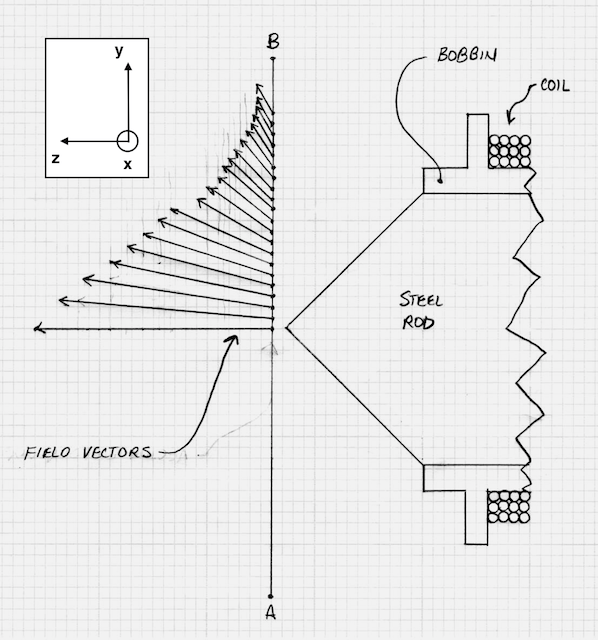
The field mapper was also built with OpenBuilds technologies. Linear actuators were constructed on the three orthographic axes. TB6600 motor controllers are used to control NEMA 17 stepper motors. A Raspberry Pi 2b is used to collect data from hall sensors and send signals to the motor controllers. The steel rods used are alloys 12L14 and 1018–both chosen for magnetic properties. Hall sensors were mounted to a 3D-printed block to hold their positions and orientations rigid. After several trials it was determined that the sensors did not measure magnetic field strengths to the same magnitude when field lines were flipped 180 degrees.